Deep learning その 2: Parameter Optimization
机器学习的一般框架是:建立模型,确定目标(损失)函数,使用最优化算法进行参数求解。
那么,神经网络当然也遵循这个基本的流程。
不同模型的损失函数评判标准不一。
例如感知机、SVM的损失函数仅由误分类点决定,即正确分类的点对参数更新没有帮助。
而Logistics回归的极大似然损失、神经网络常用的交叉熵损失则是概率模型,即使正确分类,若预测概率值与目标不相等,损失函数值仍不为零。
那么对于神经网络,初始化网络权重,根据具体的损失函数得到当前的loss后,要如何把loss最小化,即要如何进行网络中全部参数的求解呢?
答案是基于梯度的迭代方法,每一层网络参数的梯度都可以通过BP算法计算得到,那么有了梯度方向,就可以使用经典的SGD进行参数的迭代更新。
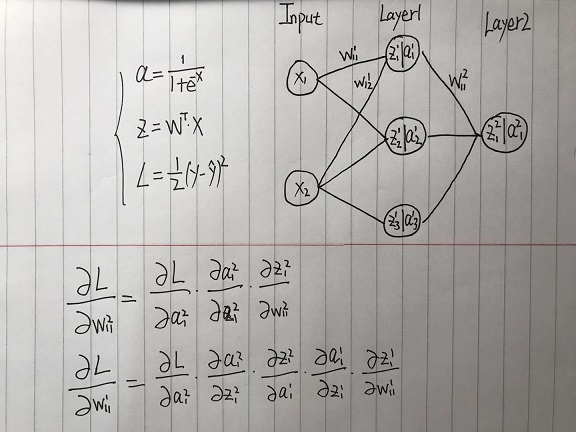
1 梯度计算
BP算法(Error Backpropagation),我的理解就是链式法则,不过因为前层网络的梯度对后层网络存在依赖关系,所以从后往前计算,避免重复计算。
假设输入为2维特征,回归问题的损失函数为MSE损失,对下面的神经网络简单推导如下。
那么因为BP中的求导是基于链式法则,当网络层数过深时,为小数的梯度值不断累乘,会造成梯度弥散。
针对梯度弥散,解决方案有以下两个:ReLU、BN。
ReLU
S型函数如Sigmoid、Tanh函数在输入过小或过大时,梯度值变得非常小,那么将其替换为ReLU族函数则不存在这个问题,虽然新的问题是ReLU易坏死。
BN
也可以从scale的角度入手,将输入值拉伸到合适的范围,避免出现过大或过小值。
2 参数を更新
2.1 SGD
神经网络普遍采用SGD,即随机梯度下降(Stochastic Gradient Descent),作为最优化方法。
SGD是GD的变体,关于梯度下降法GD,我在这篇文章里有介绍。$\rightarrow$ Logistic Regression
GD是沿着整个训练集的梯度方向下降,而SGD则是随机挑选小批量数据进行梯度下降。
那么SGD这样改进的优点在哪里呢?
- 速度快
- 引入随机性,一定程度上可以避免局部最小值
在算法实现上,有别于原始SGD,主流框架都是通过epoch来实现这种随机性。即设定一个小批量数据的数目batch_size,依次去遍历训练集,经过数次迭代后将训练集全部遍历一遍就是一个epoch。
2.2 SGD with Momentum
SGD-M的下降方向不再仅由此时的梯度决定,而是由历史梯度 $g_{t-1}$ 和此时梯度 $g_t$ 构成的动量 $m_t$ 共同决定。
简单讲历史梯度就是一个惯性,而当前梯度负责对这个惯性做微调。
定义:待优化参数 $\theta$,目标函数 $f(\theta)$,学习率 $\alpha$,动量衰减系数 $\beta_1$。
超参数 $\beta_1$ 一般取值0.9
那么更新策略如下,在每次迭代 $t$:
- 计算当前梯度:$g_t=\nabla f(\theta_t)$
- 计算当前动量(下降方向):$m_t=\beta_1\cdot m_{t-1}+(1-\beta_1)\cdot g_t$
- 更新参数:$\theta_{t+1}=\theta_t-\alpha \cdot m_t$
2.3 AdaGrad
Ada是Adaptive的缩写,AdaGrad对SGD的改进在学习率上。
AdaGrad引入了二阶动量以自适应不同参数的学习率,所谓二阶动量就是该参数所有历史梯度值的平方和$V_t=\sum_{i=1}^t g_i^2$,学习率反比于此二阶动量。其作用是在参数空间中越平缓的倾斜方向,使用越大的学习率。(Deep Learning Book 原文:Greater progress in the more gently sloped directions of parameter space.)
-
Q:为什么要在平缓的倾斜方向上使用大学习率?
A:我的理解是加入此二阶动量后,对那些历史梯度较大的参数,降低其学习率以防止震荡;而历史梯度较小的参数即 gently sloped directions,仍可以使用大学习率进行更新。
(无论优化的结果是好是坏,随着历史梯度的积累到一定程度,对应参数的更新都是趋于停滞的。简单讲就是配额制,步长配额用完的参数就停止更新。)
定义:待优化参数$\theta$,目标函数$f(\theta)$,学习率$\alpha$。
未引入额外超参数。
那么更新策略如下,在每次迭代$t$:
- 计算当前梯度:$g_t=\nabla f(\theta_t)$
- 计算当前二阶动量:$V_t=\sum_{i=1}^t g_i^2$
- 更新参数:$\theta_{t+1}=\theta_t-\cfrac{\alpha}{\sqrt V_t} \cdot g_t$
2.4 AdaDelta
与AdaGrad一样使用二阶动量来自适应不同参数的学习率,不同的地方在于AdaDelta改进了二阶动量的计算方式。加入了二阶动量衰减系数 $\beta_2$ ,避免了AdaGrad在初始梯度太大时造成之后学习率一直过低的情况。
二阶动量计算方式: $V_t=\beta_2*V_{t-1}+(1-\beta_2)g_t^2$
定义:待优化参数 $\theta$,目标函数 $f(\theta)$,学习率 $\alpha$,二阶动量衰减系数 $\beta_2$。
超参数 $\beta_2$ 一般取值0.9
那么更新策略如下,在每次迭代$t$:
- 计算当前梯度:$g_t=\nabla f(\theta_t)$
- 计算当前二阶动量:$V_t=\beta_2*V_{t-1}+(1-\beta_2)g_t^2$
- 更新参数:$\theta_{t+1}=\theta_t-\cfrac{\alpha}{\sqrt V_t} \cdot g_t$
2.5 Adam
同时引入一阶动量和二阶动量,并且针对其初始值为零的情况,进行了数值矫正。
定义:待优化参数 $\theta$,目标函数 $f(\theta)$,学习率 $\alpha$,一阶动量衰减系数 $\beta_1$,二阶动量衰减系数 $\beta_2$。
超参数 $(\beta_1, \beta_2)$ 一般取值(0.9, 0.999)
那么更新策略如下,在每次迭代$t$:
- 计算当前梯度:$g_t=\nabla f(\theta_t)$
- 计算当前一阶、二阶动量:$m_t=\beta_1\cdot m_{t-1}+(1-\beta_1)\cdot g_t$,$V_t=\beta_2*V_{t-1}+(1-\beta_2)g_t^2$
- 计算一阶、二阶动量矫正值:$\hat{m_t}=\cfrac{m_t}{1-\beta_1^t}$,$\hat{V_t}=\cfrac{V_t}{1-\beta_2^t}$
- 更新参数:$\theta_{t+1}=\theta_t-\cfrac{\alpha}{\sqrt {\hat V_t}} \cdot \hat{m_t}$
3 权重衰减
权重衰减(weight decay)是优化器中的可选项,其等价于在损失函数中加入$L_2$范数作为正则项。关于正则项,我在这篇文章里有介绍。$\rightarrow$ Generalization in Machine Learning
为什么优化器中的权重衰减等价于$L_2$范数正则项?
首先$L_2$范数的公式为$\lVert x\rVert_2=\sqrt{\sum_i x_i^2}$。
假设原始损失函数为 $f(\theta)$,那么加入$L_2$正则项(为方便计算对$L_2$范数做了一些变形)后损失函数为$g(\theta)=f(\theta)+\cfrac{\lambda}{2\alpha}\lVert\theta\rVert_2^2$。
相应在SGD优化过程中,迭代公式变为:
\[\begin{align} \theta_{t+1} &= \theta_t-\alpha \cdot \nabla g(\theta_t)\\ &= \theta_t-\alpha\cdot(\nabla f(\theta_t)+\frac{\lambda}{\alpha}\theta_t)\\ &= \theta_t-\alpha\cdot\nabla f(\theta_t)-\lambda\theta_t \end{align}\tag{あ}\]可以看出,加入 $L_2$ 正则项后,迭代公式的变化是多了一项 $-\lambda\theta_t$,因此将其称为权重衰减,超参数$\lambda$即是权重衰减系数。
Reference
[1] Github 深度学习中文版
[3] 为什么我们更宠爱“随机”梯度下降?- 非凸优化学习之路
[4] Adam那么棒,为什么还对SGD念念不忘 - Juliuszh
[5] 权重衰减-动手学深度学习